This New AI Jellyfish Robots Will Help Us To Find Untold Secret Of Ocean
Bed of ocean always remain as a place full of mysteries for humans. It holds numerous secret in it; back in history researcher many times claims that it is a place where we can find how life has actually begun and which were the first developed species.
But dinging so deep in the ocean is not possible for us. The primary reason, in my opinion, is the depth, buoyancy, funding and water pressure. Most of the ocean remain under pressures of 3000 to 9000 pounds per square inch and creating instruments which will help us to survive in it, is a very difficult and expensive task.
Now after a researcher of years, Scientists have finally come up with a safe and more affordable way to this job. Scientists have created an AI robot Jellyfish that can track and monitor fragile marine ecosystems.
This AI robot can actually swim deep in the ocean and can be sent to delicate environments, such as coral reefs, without risking collision and damage.
The AI robot is developed by a team of US scientists, from Florida Atlantic University (FAU) and the US Office of Naval Research. The researchers set out their findings today in the journal Bioinspiration and Biomimetics.
Dr. Erik Engeberg, one of the inventors of the robot from Florida Atlantic University in the US, said, “Studying and monitoring fragile environments, such as coral reefs, has always been challenging for marine researchers.”
“Biomimetic soft robots based on fish and other marine animals have gained popularity in the research community in the last few years. Jellyfish are excellent candidates because they are very efficient swimmers.
“Their propulsive performance is due to the shape of their bodies, which can produce a combination of the vortex, jet propulsion, rowing, and suction-based locomotion.”
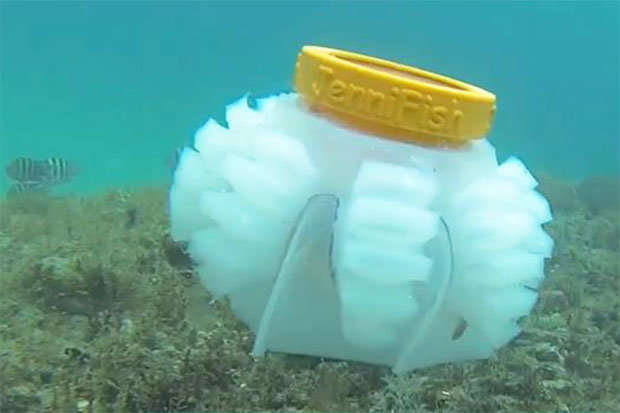
The design of Robot Jellyfish is based on the shape of the moon jellyfish (Aurelia aurita) during the larval stage of its life cycle. It has a hydraulic system which is driven by two impeller pumps, which allows the robot to swim and steer. If we talk about its size, it is a 20cm wide subaquatic device.
The impeller pump design produced an open circuit of water flow, where water from the environment was pumped into the soft actuators to produce a swimming stroke.
When the pumps were not powered, the elasticity of the tentacle actuator silicon rubber material constricted the actuators to push the water back into the environment during the relaxation phase.
This elasticity is like the passive elasticity demonstrated by live jellyfish after bell contractions. The design also removed the need for valves, reducing control complexity, space requirements, and cost.
Dr. Engeberg said: “A main application of the robot is exploring and monitoring delicate ecosystems, so we chose soft hydraulic network actuators to prevent inadvertent damage. Additionally, live jellyfish have neutral buoyancy. To mimic this, we used water to inflate the hydraulic network actuators while swimming.”
Recommended: Harvard And Google Created An AI That Predicts Earthquake Aftershocks
The team 3-D printed five different robot jellyfish, using silicon rubber for the actuators. Each jellyfish had a varying rubber hardness to test the effect it had on the propulsion efficiency.
Several of the bots have already been tested to squeeze through narrow openings, using circular holes cut in a plexiglass plate.
Dr. Engeberg said: “We found the robots were able to swim through openings narrower than the nominal diameter of the robot. In the future, we plan to incorporate environmental sensors like sonar into the robot’s control algorithm, along with a navigational algorithm. This will enable it to find gaps and determine if it can swim through them.”
More in AI :
This New AI System Accurately Identifies Cancer Type With 97% Accuracy
MIT’s New AI Algorithm Can See People Through Walls
Ford’s New AI Will Highly Reduce Fuel Consumption By Cars
Facebook’s AI Rosetta Speaks Memes, It Will Help To Detect Hate Speech
Researchers Created An AI That Can Solve A Rubik’s Cube In Just 4.22 Seconds
Nvidia’s New AI Can Automatically Remove Watermarks From Photos


